産業用ロボットの定義と種類
2025.05.15
産業用ロボットと聞いても、具体的にどんな種類があって、どう違うのか、すぐに説明できる人は意外と少ないかもしれません。
「そもそも産業用ロボットって何?」
「垂直多関節、スカラ、パラレルリンク…聞いたことはあるけれど、違いをうまく説明できない」
そんな疑問に答えるため、現役のFA技術者である筆者が、産業用ロボットの基本と種類をわかりやすく紹介します。
この記事を読むと、それぞれのロボットの特徴がすっきり頭に入り、自分に必要なロボットを選ぶときの目安がわかるようになります。
これからロボットに関わる方も、もう一度基本をおさらいしておきたい方も、ぜひ参考にしてみてください。
産業用ロボットの定義
産業用ロボットとは、工場や生産ラインなどで、人間の代わりに作業を行うために作られたロボットのことです。
たとえば、部品を運んだり、製品を組み立てたり、溶接をしたりといった作業を、プログラムされた動きで自動的に行います。
もう少し正式な定義も紹介しておきましょう。
日本産業規格(いわゆるJIS規格)のJIS B 0134:2015では、産業用ロボットは
「自動制御され、再プログラム可能で、多目的なマニピュレータであり、3軸以上でプログラム可能で、(中略)産業自動化の用途に用いられるロボット」
と定義されています。
つまり、単なる自動機械とは違い、「プログラムによって柔軟に動作を変えられる」という点が産業用ロボットの大きな特徴です。
実際の現場では、
✅繰り返し作業を正確にこなす
✅人では難しい細かな動作を安定して行う
✅危険な作業を代わりに担う
といった目的で、さまざまな種類のロボットが使われています。
本記事では、こうした産業用ロボットのなかでも、工場の自動化現場でよく使われる種類を解説します。
産業用ロボットの種類
産業用ロボットには、構造別にいくつか種類があります。構造が異なると、得意な作業、不得意な作業にも違いが出てきます。
よって、それぞれのロボットの構造を大まかにつかんでおくことが、
✅お客様に適切なロボットを提案できる
✅自社の自動化工程に最適なロボットを選定できる
きっかけとなります。
それでは、各ロボットの特徴について解説していきます。
本記事で紹介するのはいずれも自動化現場でよく使われるロボットです。一通り知っておけば、産業用ロボットの種類について自信を持って説明できるようになるでしょう!
垂直多関節ロボット
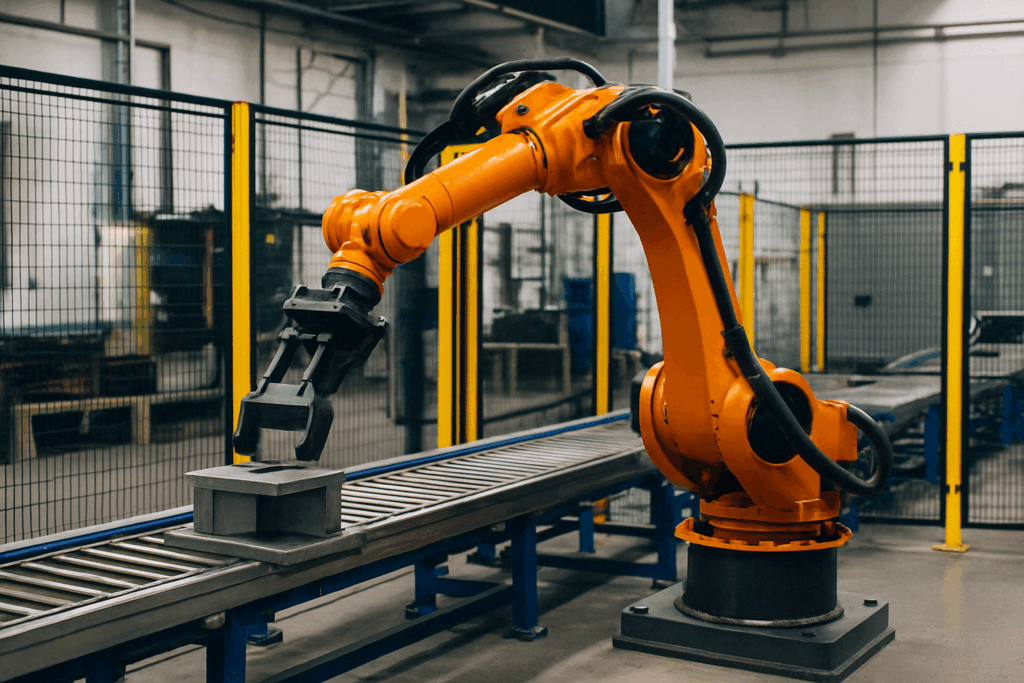
垂直多関節ロボットとは、人間の腕のようなアームを持ち、自由度の高い動きができるロボットです。
ベース(土台)から垂直方向にアームが伸び、そこに複数の関節(リンクや軸とも呼ばれることがある)が組み合わさっています。
工場の自動化ラインではもっとも一般的に使用されているロボットですので、産業用ロボットの導入といえばまず垂直多関節ロボットが候補に挙がるでしょう。
垂直多関節ロボットは広い可動範囲(リーチ)を持ち、上下方向・左右方向とも比較的リーチを大きくとることができます。また、手首をひねる動作ができるので、手先に持ったワーク(手でつかんだ部品や荷物)の向きを変える動作もできます。
この特徴を活かして、
✅製品の組立
✅部品の品質検査
✅自動車ボディの溶接
✅品物が入った段ボールの積み上げ・積み下ろし
といった作業を得意とします。
代表的なメーカーとしては、ファナック、川崎重工業、安川電機、デンソーウェーブなどが挙げられます。各社から多種多様なモデルが販売されており、作業内容に応じた最適なロボットを選ぶことができます。
水平多関節ロボット(スカラロボット)
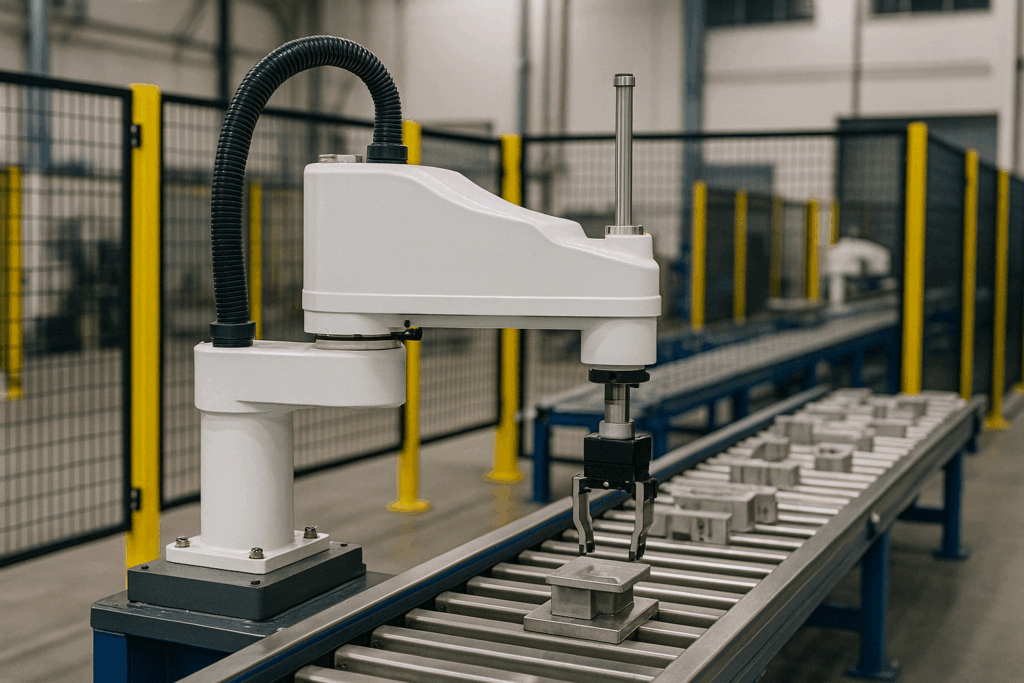
水平多関節ロボットとは、主に水平方向に動く関節を持つロボットで、「スカラロボット」とも呼ばれることがあります。
スカラロボットの「SCARA(スカラ)」とは、「Selective Compliance Assembly Robot Arm」の略です。英文名称を覚える必要はありませんが、「Selective Compliance」とは「選択的剛性」と訳します。「水平方向には柔軟に動き、垂直方向にはしっかり保持する」という特性を持っています。
水平多関節ロボット(スカラロボット)は、ベース(土台)に固定されたアームが水平方向に回転し、手先部分が上下に移動する構造になっています。
この構造により、
🔛水平方向には素早く、大きく動ける
🔝上下方向にはしっかり保持し、ある程度動ける
という動きが得意となっています。
この特徴を活かして、
✅PC・携帯電話・小型家電の組立
✅自動車部品の搬送・組立
✅ねじ締め
といった作業を得意とします。
代表的なメーカーとしては、セイコーエプソン、ヤマハ発動機、三菱電機、芝浦機械が挙げられます。
パラレルリンクロボット

パラレルリンクロボットとは、複数本のアーム(リンク)が土台から並列(パラレル)に伸び、手先(エンドエフェクタ)を支える構造を持つロボットです。
パラレルリンクロボットは、構造的にアームが軽量です。そのため、特に軽量ワーク(目安として1kg以下)のピック&プレース作業(ワークをある場所からつかみ、別の場所に運ぶ作業)が得意です。
軽い部品なら1分間に200回~300回ものピック&プレース動作が可能で、これは多くの産業用ロボットを圧倒します。
この特徴を活かして、
✅お菓子や食品のベルトコンベヤからのピッキング~箱詰め
✅医薬品の梱包
✅電子部品の高速仕分け
といった作業を得意とします。
画像の通り、パラレルリンクロボットは土台からアームがぶら下がる形をとっています。そのため、天井から吊り下げるように設置して使います。
代表的なメーカーとしては、ABB、ファナック、安川電機、川崎重工業などが挙げられます。
直交ロボット
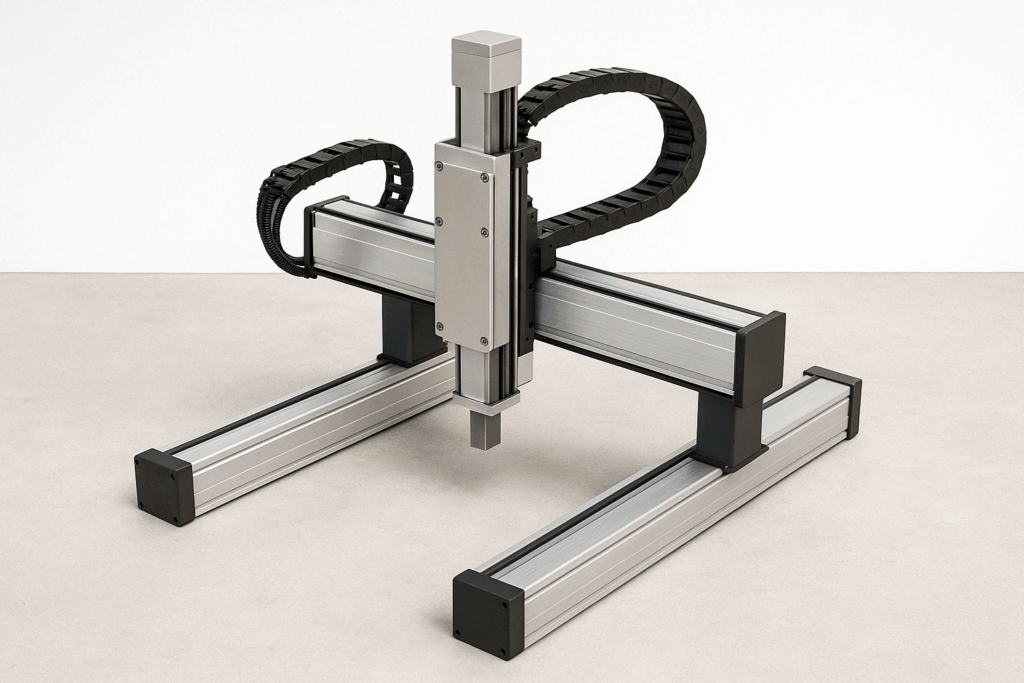
直交ロボットとは、X軸・Y軸・Z軸の3方向に直線的な動きをするロボットです。
ロボットはXYZ座標軸の形をしており、各軸に取り付けられたアームが直線移動します。
画像の直交ロボットはX軸が平行に2軸ついており、その上にY軸・Z軸アームが載る構造になっています。この構造(ガントリー構造と呼ばれています)は、土台となるX軸移動中のふらつきを少なくできます。
直交ロボットは、構造がシンプルで、動きが直線だけに限定されているため、導入コストを抑えられるのが大きな特徴です。導入後の再プログラミングも容易なため、作業現場にとって導入のハードルは低いこともメリットです。
この特徴を活かして、
✅部品の搬送
✅自動倉庫からの荷物の取り出し・預け入れ
✅バリ取り
✅シール材の塗布
といった作業を得意とします。
代表的なメーカーとしては、IAI(電動アクチュエータで世界トップシェア)、ヤマハ発動機(スカラロボットや垂直多関節ロボットと組み合わせた提案に強み)などが挙げられます。
ウエハ搬送ロボット(クリーンロボット)

ウエハ搬送ロボットとは、主に半導体や液晶製造の現場で、ウエハ(シリコン基板)やガラス基板を搬送するために使われる専用ロボットです。
製品にわずかな塵の付着も許されない清潔な環境で働くため、「クリーンロボット」とも呼ばれることがあります。
画像のロボットのように
🔛水平方向:アームが回転して移動する
🔝垂直方向:アーム全体が上下に動く機構が内蔵されている
と、垂直多関節ロボット(スカラロボット)に似た構造になっています。
アーム先端はフォーク形状のハンドが付いており、この上にウエハを載せて運びます。
クリーンロボットのアームは、クリーンルームに適応するよう摩耗粉などチリが発生しにくい構造が施されています。
この特徴を活かして、
✅半導体ウエハのプロセス間搬送
✅液晶ガラス基板の搬送
といった用途に使われます。
代表的なメーカーとしては、ローツェ(半導体搬送装置の大手)、川崎重工(大気対応モデル・真空対応モデル両方を展開)、PERSIMMON TECHNOLOGIES(アメリカ発の真空搬送ロボットに特化)などがあります。
人協働ロボット(コボット)
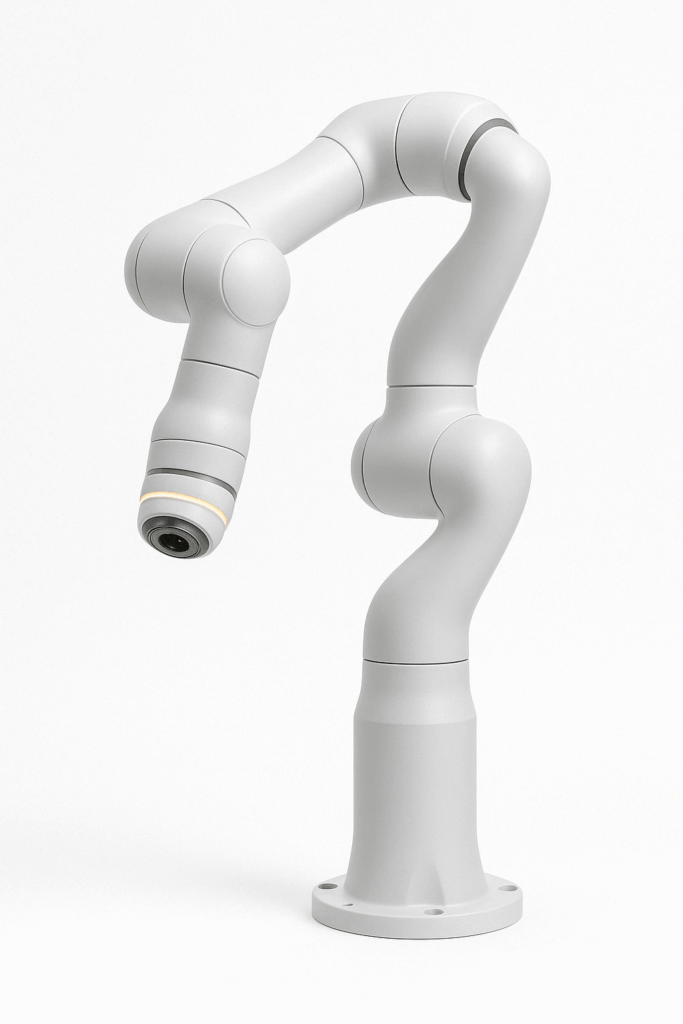
人協働ロボット(コボット)とは、人と同じ作業空間で、安全に一緒に働けるよう設計されたロボットです。
従来の産業用ロボットは安全柵で囲って使うのが前提でしたが、人協働ロボットはその安全柵なしで人の隣に配置できます※。
※ただし、「リスクアセスメントを行い、問題ないと判断されれば」という条件が必要です。
人協働ロボットの構造は、垂直多関節ロボットと同じようなアームの形をしています。動作範囲や得意とする作業も、垂直多関節ロボットと似ています。
垂直多関節ロボットと大きく違う点は「人との共同作業を配慮した構造」です。
✅外装は丸みを帯びた形状 →人と接触しても、ケガしにくい
✅関節を閉じてもすき間がある →万が一手足を挟んでも、挟まれ防止
✅内部にはトルクセンサー付きモデルも →人に触れたことをセンサーが検知、すぐに止まる
このように、「万が一人に接触した場合の安全対策」が施されています。
この特徴を活かして、
✅人の手作業とロボット作業を同時並行で行うライン構築
✅製品へのネジ締め・組立・検査などの作業
✅作業者のすぐ隣での部品供給や搬送
といった用途に使われます。
代表的なメーカーとしては、Universal Robots(世界的シェアトップ)、Techman Robot(手先にカメラを標準装備)、川崎重工(双腕型コボット「duAro」がヒット)などが挙げられます。
